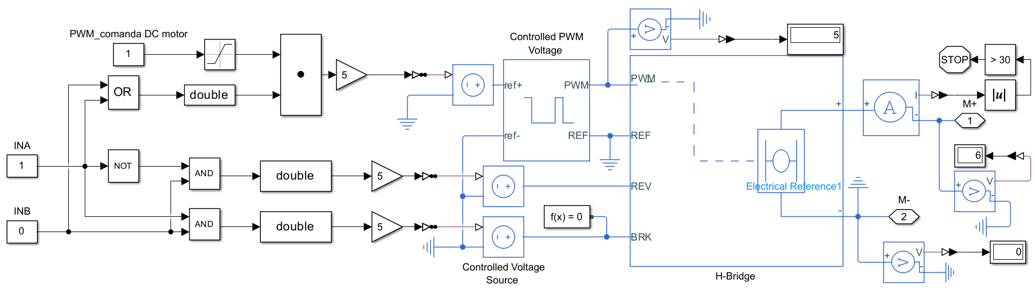
The command and control driver used in the construction of the UGV has an H-type bridge in its structure, which, depending on the signal received from the microcontroller (Arduino board) on pins (INA) or (INB), commands the braking of the motor through rotation of the output shaft clockwise or anticlockwise as shown in the control chart.
The motor load is controlled with the pin (PWM) by introducing a signal with values in the range (0, 1), where zero represents zero load (low) and one (high) maximum load.
When forward motion is simulated (INA = 1, INB = 0, PWM = 1), a positive 6V voltage is supplied to the DC motor through the (M+) port. When reverse motion is simulated (INA = 0, INB = 1, PWM = 1), a voltage of -6V is supplied to the motor and when braking is simulated (INA = 1, INB = 1, PWM = 1), a voltage of 0V is supplied to the motor.