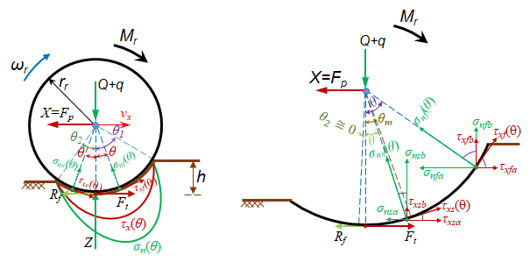
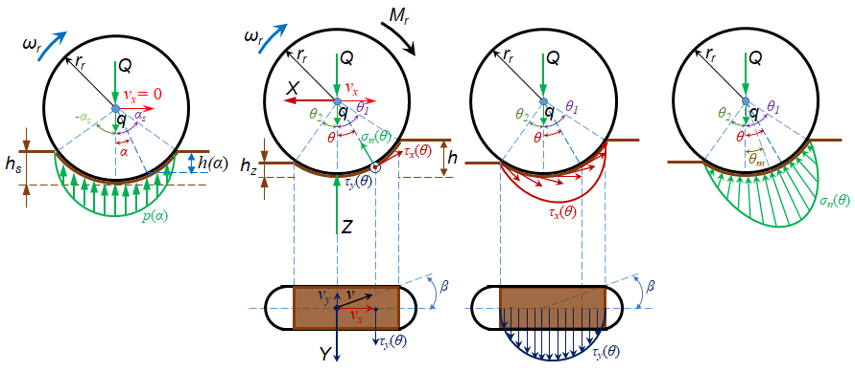
Starting from the Bekker and Wong models, a mathematical model is developed to analyze the interaction between the running path and the propulsion system. The novelty element that appears in the development of the models is the fact that the nodal theory is used. Applying the nodal theory specific rules, namely associating wheels with global nodes loaded with forces and torques that are characterized by kinematic factors, applying of the energy conservation laws and balance of load factors entering and leaving the node, a series of equations is written, which in the end, leads to the determination of expressions that approximate the ability to predict the required torque and power when moving the UGV with wheels or tracks on deformable terrain, as well as information about the kinematics of the UGV. The analysis of the interaction between the ground and the propulsion system is carried out taking into account slipping, wheels sinking, as well as soil deformation by shear stresses in between the ground and the propulsion system. In other words, the mathematical model that analyzes the interaction between the running path and the wheeled or tracked propulsion system introduces an algorithm for determining the energy consumption when moving the UGV on deformable terrain while traveling in a straight line and during turning.